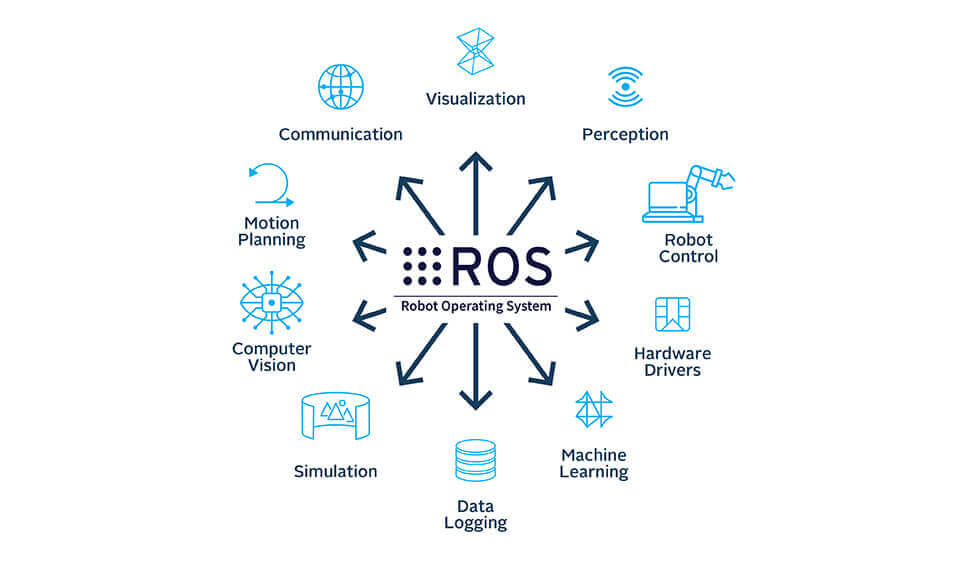
ROS è un ambiente di sviluppo open source composto da un set di librerie software, strumenti e algoritmi per lo sviluppo e la programmazione di sistemi robotici e di automazione avanzata. È un sistema modulare in continua evoluzione, che cresce grazie al contributo della sua comunità di sviluppatori.
ROS consente di programmare cinematiche complesse per un’ampia varietà di applicazioni e di sincronizzare i robot su bus industriali come EtherCAT o Profinet, rendendoli sincroni rispetto a tutti gli altri dispositivi in rete. Pacchetti specifici in continuo aggiornamento come SROS proteggono il sistema da attacchi informatici.
ROS è un componente fondamentale di tutte le soluzioni robotiche e dei drives AutomationWare. Tutti i nostri robot collaborativi vengono forniti con installazione di un pacchetto base ROS che include tutti i driver e un modello 3D del cobot, ma anche strumenti per la localizzazione e l’utilizzo delle mappe e simulatori per la pianificazione dei movimenti.
Vuoi iniziare a pianificare la soluzione su misura per la tua applicazione o progettare e testare i singoli moduli software offline? Mettiamo a disposizione software di simulazione con modelli di robot 3D, ambienti di test e un pacchetto di navigazione preconfigurato e facilmente adattabile. Puoi simulare tutti i dati del sensore, creare mappe e far muovere il cobot nell’ambiente virtuale. Un’occasione per vedere il comportamento di guida dei nostri robot collaborativi, provare come reagiscono a diverse condizioni e ostacoli e testare le tue modifiche.
Il primo passo per iniziare a conoscere Robot Operating System è collegarsi al sito ros.org dove è possibile consultare la lista delle piattaforme compatibili, e avere una serie di informazioni, a cominciare dalla prima installazione e dalle istruzioni per compiere i primi passi.

Un esperto in robotica del Team AutomatioWare
Ti contatterà per rispondere a tutte le tue domande
e supportarti in qualsiasi nuovo progetto


Copyright 2024 © All rights Reserved