RoboVu ™virtual connector for connecting from ROS (Robot Operating System) applications to Ethercat
RoboVu ™ connection software to drive Actuators from ROS (Robot Operating System).
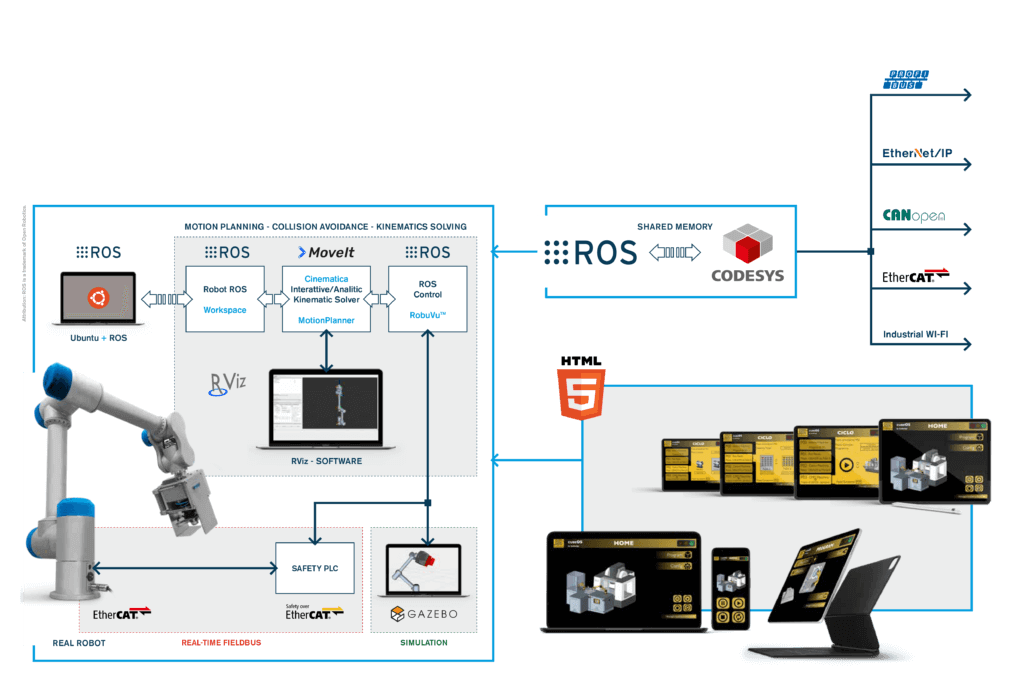
Linux application, designed and patented by AutomationwareRoboVu ™, simplifies the connection of virtual ROS applications to the EtherCat bus. The robot manager plans the movements in the virtual area and thanks to the RoboVu ™ application can transfer them to the fieldbus to move the connected actuators in real time, ensuring the control of accessory functions such as gravity compensation or alarms from joints for reasons of operation. RoboVu ™ connection software to drive Actuators from ROS (Robot Operating System).
• It is installed on the AW-Controller PC based on Linux Ubuntu
• Use ROS applications for kinematic modeling
• Implements EtherCat Master functions thanks to the use of SOEM libraries
• Uses a real-time patch to ensure maximum system performance
• Connected to the AW-Drivers (see AW-Motion session), it can also manage drives in multi-axis configurations for the management of machines in sync with Robots (EtherCAT Based)
The application manages the field bus in real time and allows a possible extension of the control also to accessory systems with respect to the robot such as grippers, vision devices, or Cartesian or mobile systems integrated in the robotic cell. (in the wireless configuration it is prepared). RoboVu ™, simplifies robot control under wireless management conditions (example: robotic arm mounted on motion shuttle (AVG)), or (applications requiring a simplified connection of the cobot with the central PC). All safety functions will be installed on the AW-Tube robotic arm, significantly improving the safety level of the entire system (SafeVu PLC)
Warning: Trying to access array offset on value of type null in /var/www/vhosts/automationware.it/httpdocs/wp-content/plugins/elementor-pro/modules/nav-menu/widgets/nav-menu.php on line 1446
Warning: Trying to access array offset on value of type null in /var/www/vhosts/automationware.it/httpdocs/wp-content/plugins/elementor-pro/modules/nav-menu/widgets/nav-menu.php on line 1459
Warning: Trying to access array offset on value of type null in /var/www/vhosts/automationware.it/httpdocs/wp-content/plugins/elementor-pro/modules/nav-menu/widgets/nav-menu.php on line 1470
Warning: Trying to access array offset on value of type null in /var/www/vhosts/automationware.it/httpdocs/wp-content/plugins/elementor-pro/modules/nav-menu/widgets/nav-menu.php on line 1483 Menu