

Intelligence deduction, infinite motion.
Six-Axis collaborative cobot
Safe:
they can work side by side with the
human beings without a security fence,
possess a high level of reliability and safety.
Lightweight:
world’s first collaborative robots, which weigh
less and charge more.
Easy to use:
transport, assemble and disassemble, easily
liftable by hand, powered from 220V to 48V.
Efficient:
Maximum straight line speed up to 2.8 m/s , high working productivity, smooth trajectory e consistent action.
ROS programmable:
all collaborative AW-TubeValue robots have a ROS package of base which includes drivers and a 3D model of the cobot, but also tools to locate and use maps and simulators for movement planning.
Modularity and Mobility without ballast:
installed on ML 135 Roboline for management with 7 axes – telescopic column (8 axes).
Version M installable on AutomationWare AGV AWM500-700
Free Drive:
function of the super sensitive drag and playback complete with the drag track
Collision detection:
realize the safe human-robot interaction, detect the collision between the robot and the staff in real time and ensures that will not harm the staff through corresponding control strategies.
Drag-move:
function capable of reproduce the entire drag-move trajectory.

3 Industrial Wi-Fi connection for Kinematics-Safety-Programming
Omnidirectional Wheels for accurate Positioning and fast driving (max 400 Kg)
High Payload Manipulation with direct Control of
Robotic Arms AW-Tube others Cobotics system
Full TUV certified 2D Lidar System to detect the full operating area 3D oprional CAmera for AI applications
The mobile robots of the AW-Mobile series are a safe and flexible solution to optimize production processes and internal logistics. In research application they serve as test platforms for next generation robots.
Our AGV or AMR are designed to meet the TÜV safety requirements thanks to advanced sensor technology and intelligent algorithms, they can move freely in all environment, avoid people and obstacles dynamically and reach their destination independently.
The Wi-Fi industrial connection (TUV certified) allows the remote maintenance and the simultaneous control and management of robot and of every other device connected to the network. With ROS (Robot Operating Systems) you can configure and easily adjust navigation setups,
as well as test your mobile robot.
Coordination of multiple robots is also available.
Find out all AW Tube Value applications





3C industry ( Computer,Communication,Consumer
Electronics)
Many factories produce a single type of product in a short period of time andthen switch to producing some other products. Ahighly flexible production method like that places new requirements not only on personnel but also on the automation equipment. Taking the inspection station as an example, some clients demand that production lines to be switched once every few hours.
The traditional mechanical platform used for loading and unloading is not capable of meeting that requirement. As a result, for these applications, we need to come up with solutions with high compatibility and fast switching capabilities.
Consequently, for these applications, we have need to find solutions with high compatibility switching capacity quick.
The characteristics of a collaborative robot allow you to solve the problems
and to achieve objectives such as: structure compact, none need for
fence maximum safety space efficiency combined with AGV, guide
rail o lifting, column and a workspace expandable larger.




The development of manufacturing has created the demand for human-robot collaborative robots. As the internal and external environments of manufacturing go through changes, major transformations have taken place in terms of production conditions and models.
Price pressure, challenges of production linemanagement, flexibility and switching, increasing global competition, labor shortages, increased productivity demand, and product quality requirements have become he constraints for many companies’ production line upgrades and structural transformations.
These factors also have set higher requirements for enterprises to adapt to changes in industry and the market.
As an industry with high added value and high level of automation, the automobile industry entered the eyesight of collaborative robot companies a long time ago.
Combining the characteristics of light load and high flexibility of the products, the auto parts industry has become the most suitable entry point for these businesses. In recent years, the major collaborative robot manufacturers have, without exception, taken this vertical industry as the direction of key cultivation. For a long time, the
automotive industry is known for strict standards and thorough systems, as well as emphases on efficiency and standardization.
The safety of collaborative robots can precisely provide users with a “safe” and “efficient” solution, allowing humans and robots to coexist and collaborate. Users in the automotive industry are very concerned about ensuring the safety of operators while improving efficiency.
AW-EC 3kg, 6kg, 12kg collaborative robots can be used in automation scenarios of automotive parts and automotive electronics, including: engine tightening, car seat
tightening, reducer gluing, window gluing, headlight welding, instrument panel and PCB board detection loading and unloading, flywheel pick-up and assembly, palletizing, machine tool loading and unloading, and so on.
A robotics expert from the AutomatioWare Team
He will contact you to answer all your questions
and support you in any new project






Under the wave of new consumption and new retail, concepts such as unmanned supermarkets, vending machines, facial recognition, and sensorless payment have emerged. All of these trends are realized through the “close-scene”
human-computer interaction done by devices and software.
With the rapid growth of the entire industry, both developers and manufacturers in the “new retail” industry and upstream equipment manufacturers have noticed the huge market potential and the unique demand.
The new AW-Tube Value are ideal for new consumption and new retail industries due to its programming and visual visibility that are much simpler than traditional industrial robots, on top of its compact structure and small area occupation.
We believe that in the near future, after combining various sensors and mobile platforms, in addition to industrial scenarios, collaborative robots will gradually enter into people’s everyday life, and bring various new experiences to consumers.



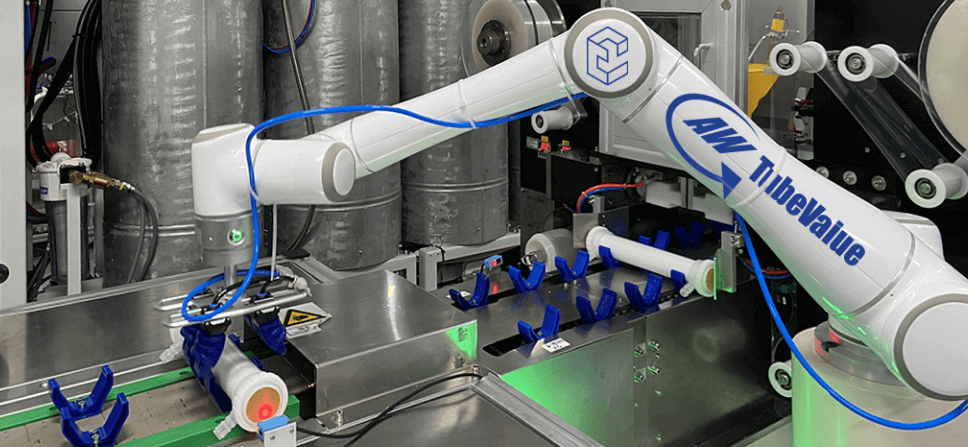
Using collaborative robots AW-Tube Value can simplify packaging and stacking operations, making the process simpler, faster, and more efficient.
The addition of collaborative robots frees workers from the burdensome and repetitive bending and carrying movements, improves efficiency’s system The free drive teaching and interactive programming of the teaching pendant allow users to easily cope with small batches and multiple varieties. Compared to traditional industrial robots, the programming difficulty of collaborative robots is also reduced. Therefore, the application debugging time can be shortened when dealing with different packaging box, and thus the disruption of normal production processes can also be reduced during switching.
The 3kg, 6kg, 12kg load and arm length range can cover the sorting, packaging, stacking, and dismantling requirements from small items to large boxes. Together with AGV, moving rails or lifting columns, the robot’s motion range can be expanded and meet various packaging automation requirements.

Whether it is welding, machine loading/unloading, or irregular metal parts grinding, collaborative robots are useful in different scenarios of the metal processing industry. Although the processes, materials, and specialty products may vary, the common features of collaborative robots can help factories increase efficiency.
Precision:
The precision of acooperative robot can reach + -0.03mm, thus it can easily meet the positioning accuracy requirements of various machining processes.
Rapid deployment:
The deployment of a lightweight collaborative robot is flexible, and the requirements for installation position are not high. It is suitable for various installation modes, such as front installation, inverted installation, and side installation.
As a consequence, it is simple and easy to reconstruct the existing production line. The working area of the compact robot does not need to be equipped with a safety fence. Therefore, in addition to the small area occupation of the robotic arm, the working area of the robot does not need to be isolated from the safety area. A co-working space between humans and robots can be achieved when the system risk assessment is passed.
Easy programming:
The interactive programming method of the teaching pendant allows the engineer to be more efficient when editing the robot trajectory, thereby shortening the project
integration and debugging cycle.

For collaborative robots, picking and placing parts is the most common application, accounting for more than 60% of the total application.
For many factories, the process of loading and unloading the machine and the process of linking the working islands include a large number of pickand- place actions, and this action is undoubtedly of very low added value if performed manually by human.
Collaborative robots can achieve pick-and-place automation for different materials. They are small and lightweight and can be easily moved and deployed in different stations of the workshop. They are easy to program and users can save programs for reuse.
Therefore, for materials of different specifications and shapes, the collaborative robot can be quickly put into use after teaching and planning the motion trajectory to minimize the loss of downtime caused by product switching.
Product pick and place, machine loading
and unloading
• PCB board or electronic componentinspection (a type of loading and unloading)
Robotic arm carries vision camera for object surface inspection
A GV for carrying goods
• 2D or 3D camera for random sorting

Many scenarios must have a human, because humans are not only flexible, but can also solve complex problems.
For example, assembly applications require operators to perform a series of complex and delicate actions during the product manufacturing process and handing these tasks that can be easily completed by human hands over to traditional industrial robots can make executions quite difficult.
The original idea behind the design of collaborative robots is to replace the labor that can be done by human hands with mechanized equipment.
Therefore, the stability and repeatability of machinery and the flexibility of manpower are taken into thorough consideration. AW-Tube Value collaborative robots have an accuracy of +/- 0.03mm and a maximum linear speed of 3.2m / s, which can meet the beat and accuracy requirements of most manual assembly stations.
The open and diverse interfaces are suitable for pairing with various types of end effectors and sensors (including vision camera, force control sensor, clamping jaw, screw-tightening gun, welding gun, etc.).
Insert USD and cardinal plate memory
PCB board insert shaped parts
• 3C electronics industry small torque
screw tightening (ex. tablet PC, router)
Auto parts industry high torque screw
tightening (ex. engine, lights, car seats)

Whether it is plastic gates, deburring, metal sanding, or wood polishing, many factories still use manual operations.
For industry workers, many of these materials removal processes produce dust, debris, and noise, and working in such contaminated environments for a long time pose a huge threat to their health.
For enterprises, not only do these positions have a high turnover rate, but also the consistency of products operated by humans is not ideal.
Collaborative robots with integrated force sensors ensure consistent grinding and polishing results, even on curved and rough surfaces.
The robotic arm can automatically adjust the position according to the shape of the surface of the object and perform fine material removal tasks with appropriate strength. The interactive programming mode of the AW-Tube Vaue tomationware collaborative robot’s teaching pendant is simple and visual.
The main trajectory of the robot can be calibrated by dragging the teaching function, thereby helping system integrators shorten the project cycle.
Rimozione del materiale di scarto
• Bathroom products plastic parts degating
Sanding of metal parts
• Polishing of metal parts
Polishing furniture and household
equipment

AW-Tube Value collaborative robots can be used in most packaging and stacking applications.
The installation space of the collaborative robot is small, the programming and operation movement can be quickly modified, and it can be used with many different devices at the same time.
After setting the program for the robot, the robotic arm will count and travel accurately according to the instructions, ensuring that the user always delivers the correct quantity and consistent state of the goods.
The collaborative robot’s simple programming method simplifies the packaging and stacking operations.
During the robot’s working session, if the user needs to change the robot’s running trajectory or increase or decrease the movement (such as the size of the packaging box, the number of stacking layers and the number of each layer), the robot can resume work again after quick commissioning and modification of points.
Visual sorting of medicines
Food packaging
Palletizing of boxes
Disassembly of packing box


Copyright 2024 © All rights Reserved