AW-TubeValue
Six-Axis collaborative cobot
Applicazioni Industriali
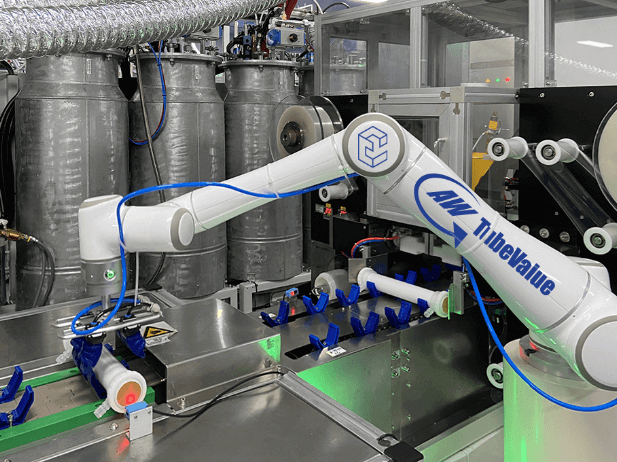
Industria 3C (computer, comunicazione, elettronica di consumo)
La velocità di produzione e la flessibilità di realizzare prodotti diversi sulla stessa linea richiede cambi di programmazione repentini della linea, molte aziende usano la stessa linea per produzioni diverse e quindi si deve essere veloci nel riprogrammarla, ma la riprogrammazione altamente flessibile richiede requisiti differenti ogni volta, non solo del personale, ma anche di attrezzature automatiche (esempio la stazione di ispezione), dove clienti richiedono che le linee di produzione vengano cambiate una volta ogni poche ore.
La tradizionale piattaforma meccanica utilizzata per il carico e lo scarico non è in grado di soddisfare tale requisito.
Di conseguenza, per queste applicazioni, abbiamo bisogno di trovare soluzioni con elevata compatibilità e capacità di commutazione rapida.
Le caratteristiche di un robot collaborativo consentono di risolvere i problemi e di raggiungere obbiettivi come: struttura compatta, nessuna necessità di recinzione di sicurezza, massima efficienza di spazio abbinata a carrello AGV, binario di guida o sollevamento, colonna e un’area di lavoro espandibile più grande.
Applicazioni
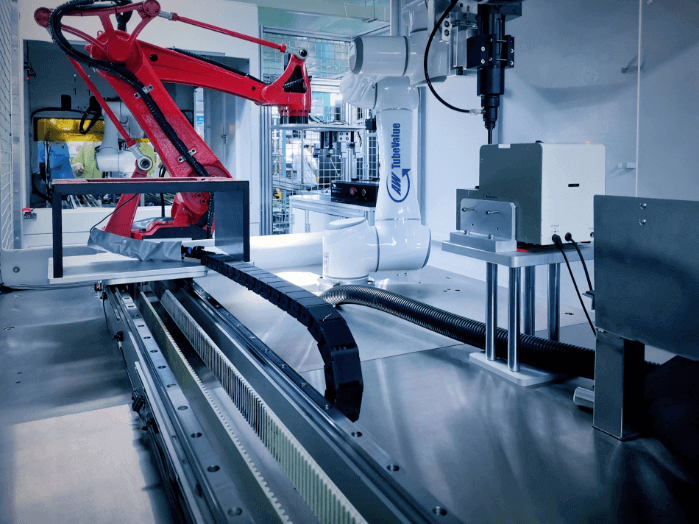
Industria Automotive
Nell’automotive l’accellerazione della produzione ha innalzato la domanda di robot collaborativi uomo-robot, visto i cambiamenti degli ambienti interni ed esterni della produzione, si sono verificate grandi trasformazioni in termini di condizioni e modelli di produzione.
Pressione sui prezzi, sfide nella gestione della linea di produzione, flessibilità e commutazione, aumento della concorrenza globale, carenza di manodopera, aumento della domanda di produttività e requisiti di qualità del prodotto sono diventati i vincoli per la linea di produzione di molte aziende.
Questi fattori richiedono requisiti più elevati per le imprese di adattarsi ai cambiamenti e essere veloci e competitivi mercato, per questo l’industria automobilistica è entrata nel campo dei robot collaborativi.
Da sempre l’industria automobilistica è nota per la efficienza e la standardizzazione.
La sicurezza dei robot collaborativi fornisce precisamente agli utenti una soluzione “sicura” ed “efficiente”, consentendo a esseri umani e robot di coesistere e collaborare e garantendo la sicurezza degli operatori migliorando l’efficienza.
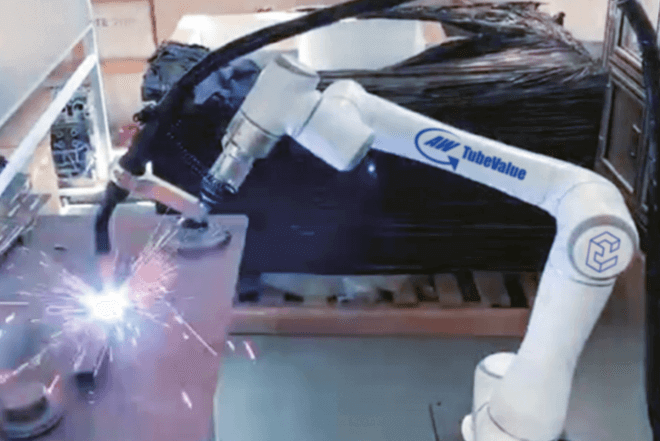
I robot collaborativi AW-EC 3kg, 6kg, 12kg possono essere utilizzati in scenari di automazione di parti automobilistiche e elettronica automobilistica, tra cui: serraggio motore, serraggio seggiolino auto, incollaggio riduttore, incollaggio finestrini, saldatura dei fari, carico e scarico del rilevamento del cruscotto e della scheda PCB, pick-up del volano e assemblaggio, pallettizzazione, carico e scarico di macchine utensili e così via.
Applicazione di robot collaborativi in vari settori
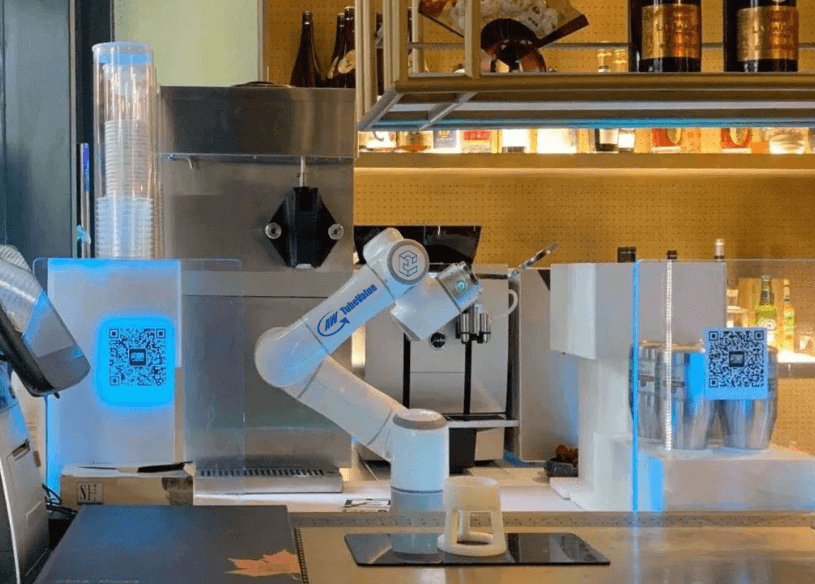
Sotto l’onda del nuovo consumo e della nuova vendita al dettaglio, concetti come supermercati senza personale, distributori automatici, riconoscimento facciale, pagamenti senza sensori hanno fatto si che queste tendenze si realizzano attraverso l’interazione uomo-computer “ravvicinata” fatto da dispositivi e software.
Con la rapida crescita dell’intero settore, sia gli sviluppatori che i produttori nella nuova industria al dettaglio e i produttori di apparecchiature a monte hanno notato l’enorme potenziale di mercato e la domanda unica.
Con i nuovi AW-Tube Value mini robot AutomationWare può penetrare nello scenario più commerciale, come sviluppo di stazioni caffè automatiche, stazioni di gelati, stazioni di tè al latte e ristoranti senza personale.
I robot collaborativi sono diventati lo scenario ideale per nuovi consumi e nuove industrie di vendita al dettaglio per la programmazione e visibilità visiva che sono molto più semplice dei tradizionali robot industriali, per di più struttura compatta e piccola area occupata.
Applicazioni di Logistica/packaging
L’utilizzo di AW-Tube Value, robot collaborativi può semplificare le operazioni di imballaggio e impilamento, rendendo il processo più semplice, veloce e efficiente.
L’aggiunta di robot collaborativi libera i lavoratori dai gravosi orari di lavoro e da movimenti ripetitivi di piegamento e trasporto, migliora l’efficienza del sistema. Rispetto ai tradizionali robot industriali, si riduce anche la difficoltà di programmazione dei robot collaborativi.
Pertanto, il tempo di debug dell’applicazione può essere ridotto quando si tratta di scatole di imballaggio diverse, e quindi l’interruzione dei normali processi di produzione può essere ridotta anche durante commutazione.
La gamma di carichi da 3 kg, 6 kg, 12 kg e lunghezza del braccio può coprire i requisiti di smistamento, imballaggio, impilamento e smontaggio dai piccoli oggetti alle grandi scatole. Insieme ad AGV, guide mobili o colonne di sollevamento, la gamma di movimento del robot può essere ampliato e soddisfare i vari requisiti di automazione del packaging.
Applicazioni Assembly
Che si tratti di saldatura, carico / scarico macchina o irregolare rettifica di parti metalliche, i robot collaborativi sono utili in diversi scenari dell’industria della lavorazione dei metalli.
Sebbene i processi, i materiali e i prodotti speciali possono variare, le caratteristiche comuni dei robot collaborativi possono aiutare le fabbriche ad aumentare l’efficienza.
Precisione:
il robot può raggiungere + -0,03 mm, quindi può facilmente incontrare il requisiti di precisione di posizionamento di vari processi di lavorazioni.
Implementazione rapida:
implementazione di un robot collaborativo leggero è flessibile e i requisiti per l’installazione non è difficile.
Adattabile per varie modalità di installazione, come installazione frontale, installazione invertita e installazione laterale, rendendo semplice e facile ricostruire la linea di produzione esistente.
L’area di lavoro del robot compatto non necessita di essere dotato di recinzione di sicurezza.
Pertanto, oltre alla piccola area occupata dal braccio robotico, non è necessario isolare l’area di lavoro del robot dall’area di sicurezza.
Uno spazio di co-working tra uomo e robot può essere ottenuto quando la valutazione del rischio del sistema è stata superata.
Programmazione facile:
Il metodo di programmazione interattiva consente all’ingegnere di essere più efficiente durante la modifica della traiettoria del robot, accorciando così il progetto ciclo di integrazione e debugging.
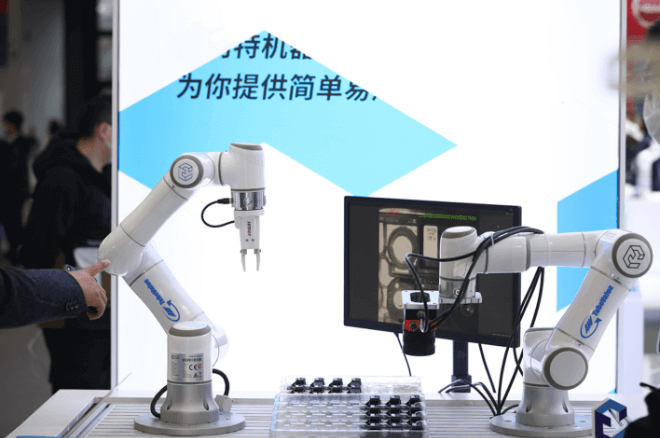
Applicazioni Pick and place
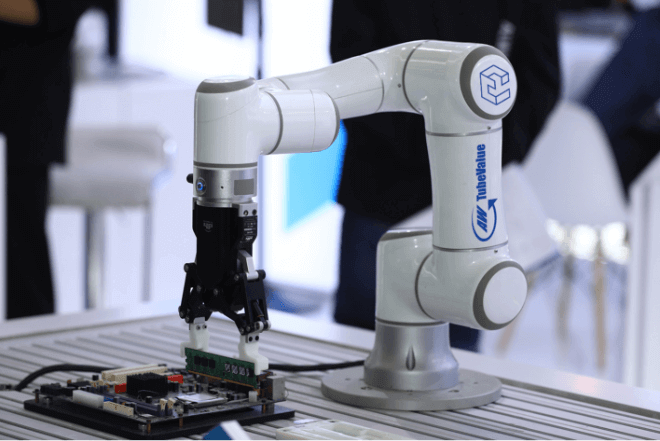
Per i robot collaborativi, il prelievo e il posizionamento delle parti sono le applicazioni più comuni, rappresentano più del 60%.
Il processo di collegamento delle isole di lavoro include un gran numero di azioni pick-and-place, e questa azione è indubbiamente di bassissimo valore aggiunto se eseguito manualmente da persona.
I robot collaborativi possono ottenere l’automazione pick-and-place per materiali diversi.
Sono piccoli e leggeri e possono essere facilmente spostati e impegnati in diverse stazioni dell’officina.
Sono facilmente programmabili e gli utenti possono salvare i programmi per il riutilizzo.
Pertanto, per materiali di specifiche diverse e forme, il robot collaborativo può essere rapidamente utilizzato dopo aver insegnato e pianificato la traiettoria del movimento per ridurre al minimo la perdita di tempo di inattività causata dal cambio di prodotto.
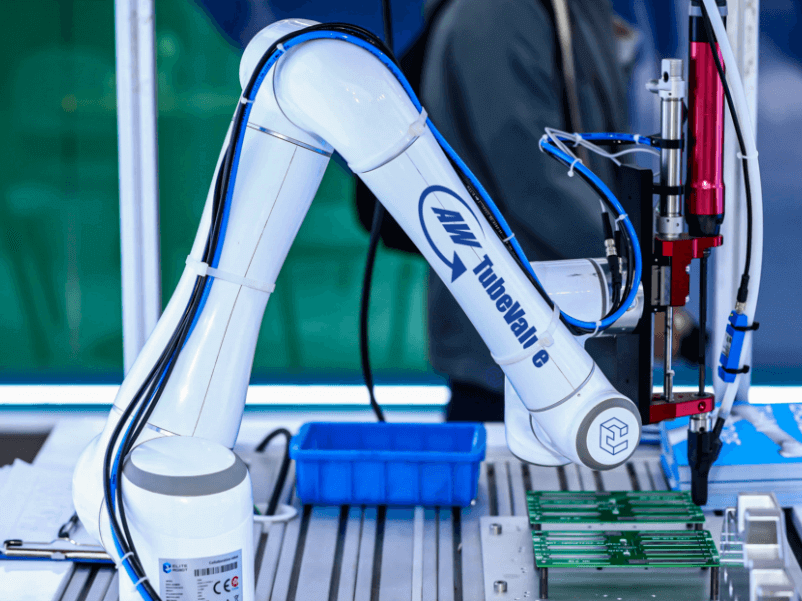
Prelievo e posizionamento del prodotto, carico e scarico della macchina
Scheda PCB o ispezione di componenti elettronici (caricamento e scaricamento)
Il braccio robotico con telecamera di visione per ispezione superficie oggetto
GV per il trasporto di merci
Fotocamera 2D o 3D per ordinamento casuale
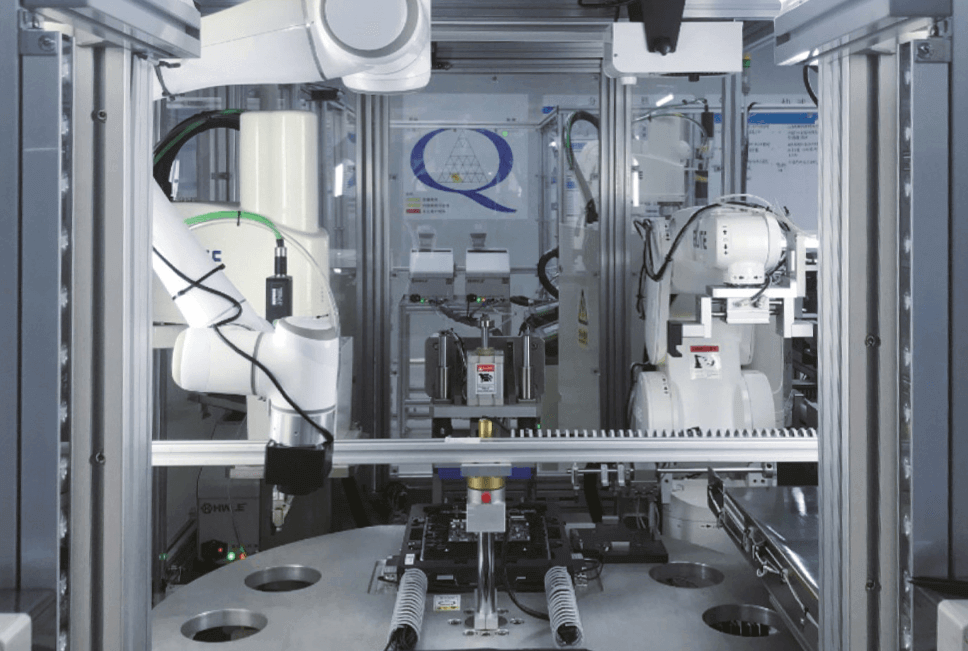
Applicazioni Assembly
Molti scenari devono avere un essere umano, perché non solo sono flessibili, ma possono anche risolvere problemi complessi.
Ad esempio, le applicazioni di assemblaggio richiedono agli operatori di eseguire una serie di operazioni complesse e delicate, azioni che durante il processo di fabbricazione del prodotto e l’esecuzione di alcune attività possono essere facilmente completate dal passaggio dell’uomo ai robot industriali tradizionali può rendere le esecuzioni piuttosto difficili.
L’idea originale alla base del design dei robot collaborativi è quella di sostituire il lavoro che può essere svolto dall’uomo manualmente con attrezzatura meccanizzata.
Pertanto, la stabilità e la ripetibilità dei macchinari e la flessibilità di manodopera sono presi in considerazione approfondita.
I robot collaborativi AW-Tube Value hanno una precisione di +/-0,03 mm e una velocità lineare massima di 3,2 m / s, in grado di soddisfare i requisiti di battito e precisione della maggior parte delle stazioni di assemblaggio manuale.
Le interfacce aperte e diversificate sono adatte per l’accoppiamento con vari tipi di dispositivi di estremità e sensori (inclusi telecamera di visione, sensore di controllo della forza, ganascia di serraggio, serraggio a vite pistola, pistola per saldatura, ecc)
Inserimento USD e memorie di cardinal plate
Inserimento parti sagomate su schede PCB
Serraggio viti a piccola coppia per industria elettronica 3C (es. tablet PC, router)
Serraggio a vite ad alta coppia per l’industria dei ricambi auto
(es. motore, luci, seggiolino auto)
Applicazioni
Materiale removibile
Che si tratti di cancelli in plastica, sbavatura, levigatura di metalli o lucidatura del legno, molte fabbriche utilizzano ancora le operazioni manuali.
Per i lavoratori dell’industria, molti di questi processi di rimozione dei materiali producono polvere, detriti e rumore, e lavorare a lungo in ambienti così contaminati rappresenta un’enorme minaccia per la loro salute.
Per le imprese, non solo queste posizioni hanno un alto tasso di turnover, ma anche la consistenza dei prodotti operati dagli esseri umani non è l’ideale.
I robot collaborativi con sensori di forza integrati garantiscono risultati di levigatura e lucidatura coerenti, anche su superfici curve e ruvide.
Il braccio robotico può regolare automaticamente la posizione in base alla forma della superficie dell’oggetto ed eseguire operazioni di rimozione del materiale fine con forza adeguata.
La modalità di programmazione del ciondolo didattico del robot collaborativo AW-Tube Value è semplice e visiva.
La traiettoria principale del robot può essere calibrato trascinando la funzione di insegnamento, aiutando così gli integratori di sistema ad accorciare il ciclo del progetto.
Rimozione del materiale di scarto
Prodotti da bagno, parti in plastica che degenerano
Levigatura di parti metalliche
Lucidatura di parti metalliche
Lucidatura di mobili e articoli per la casa
Applicazioni Moving
I robot collaborativi AW-Tube Value possono essere utilizzati nella maggior parte delle applicazioni di imballaggio e impilamento.
Lo spazio di installazione del robot collaborativo è piccolo, il movimento di programmazione e funzionamento può essere modificato rapidamente e può essere utilizzato con molti dispositivi diversi contemporaneamente.
Dopo aver impostato il programma per il robot, il file robotic conterà e viaggerà accuratamente secondo le istruzioni, assicurandosi che l’utente consegni sempre la quantità corretta e stato coerente della merce.
Il semplice metodo di programmazione del robot collaborativo semplifica le operazioni di confezionamento e impilamento.
Durante la sessione di lavoro del robot, se l’utente deve modificare la traiettoria di corsa del robot o aumentare o diminuire il movimento (come la dimensione della scatola di imballaggio, il numero di strati di impilamento e il numero di ogni strato), il robot può riprendere il lavoro dopo una rapida messa in servizio e modifica dei punti.
Ordinamento visivo dei medicinali
Confezionamento alimentare
Pallettizzazione di scatole
Smontaggio della scatola di imballaggio

