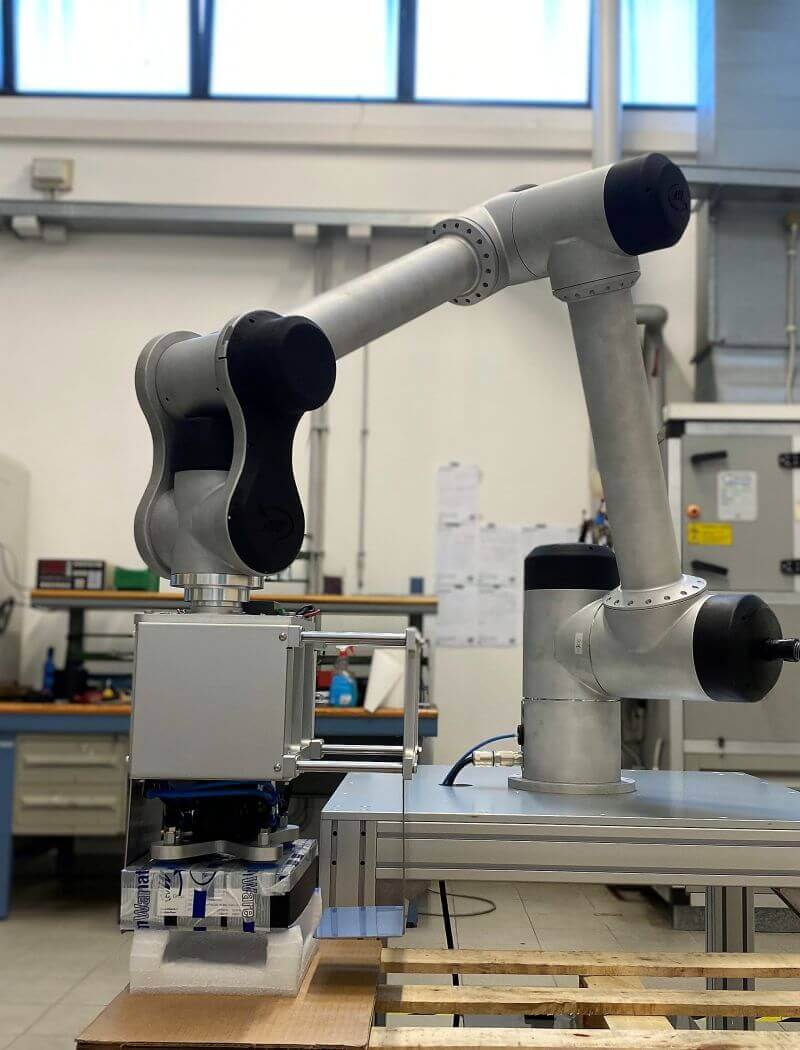
Molti robot collaborativi non hanno doti di carico su aree operative oltre il 1000 mm. AW-Tube e’ un sistema modulare e permette anche di sollevare 15 Kg. alla sua massima estensione di 1800 mm. E’ un nuovo concetto di robotica basato su un approccio modulare per rispondere alle applicazioni con la configurazione adeguata. Motion planned in ROS e gestione dei giunti con EtherCat completano la configurazione . Un ottima soluzione anche per essere montato su AGV e AMR. Inviate una mail a sales@automationware.it per saperne di piu’ e per applicare le ns configurazioni nelle vostre applicazioni.






